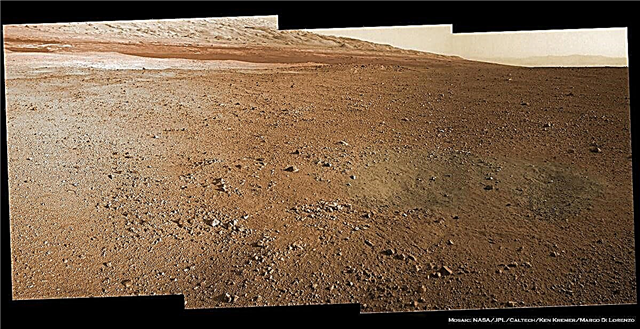
Bildtexter: Mosaik av Mount Sharp inuti Curiositys Gale Crater landningsplats. Gale Krater i det disiga avståndet. Denna mosaik syddes av tre Navcam-bilder i full upplösning som returnerades av Curiosity på Sol 2 (8 augusti) och färgades baserat på Mastcam-bilder från 34 millimeter-kameran. Bearbetning av Ken Kremer och Marco Di Lorenzo. Kredit: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Curiosity rover har strålat tillbaka de första detaljerade bilderna av Mount Sharp, och erbjuder en häpnadsväckande första bild av hennes ultimata drivande mål, och är nu mitt i en avgörande "hjärntransplantation" i helgen som kommer att förvandla henne till en fullt fungerande rover.
Vetenskapsteamet kommer att leda sexhjuliga nyfikenheten att börja klättra Mount Sharp vid något senare datum under rovernas tvååriga primära uppdrag efter att ha korsat och utförligt undersökt golvet på hennes landningsplats inuti Gale Crater.
Se vår mosaik med fokus på basen på Mount Sharp med hjälp av tre bilder i full upplösning knäppt av Navcam-navigeringskameran som ligger på den nyligen uppförda kameran och instrumentmasten med färgning baserad på den 34 millimeter Mastcam färgkamera.
Nyfikenhet vilade nästan platt på den martiska ytan, men med en liten 3 graders lutning framför och bilderna hittills är tagna från den förprogrammerade synvinkeln, ungefär sex mil eller så från basen på Mount Sharp.
Terrängen är ströd med små stenar som kan komma från en närliggande alluvial fläkt genom vilken flytande vatten strömmade för länge sedan, tror forskare. Observationer från omloppsbana med NASA: s Mars Reconnaissance Orbiter har identifierat lera och sulfatmineraler i de nedre lagren av Mount Sharp, vilket indikerar en våt historia. Vid högre höjder hoppas forskare att upptäcka ett gränsskikt och indikationer på vad som ledde till "Great Dessication Event" och förlust av flytande vatten på den antika Martianytan.
I helgen har Curiosity också börjat sända spektakulära högupplösta Mastcam-bilder som hittills kommer att överstiga allt annat. Här är Mastcam 360-pano som monterats av NASA hittills:

Bildtexter: Första högupplösta färgmosaik av nyfikenhetens Mastcam-bilder. NASA / JPL-Caltech / MSSS
Men innan den bilstora roboten faktiskt kan svänga runt, räcka ut med sin sju fot (2 meter) långa instrumentbelastade arm och skaffa upp prover för analys av de kemiska laboratorierna ombord behöver hon mjukvaran smarts för att utföra vetenskapliga uppgifter.
Med alla de första målsättningarna efter landning uppnådda, spenderar ingenjörer vid NASA: s Jet Propulsion Lab i Pasadena, Kalifornien, fyra Sols eller Martian-dagar och konsoliderar i helgen för att ladda upp ett nytt programvarupaket med namnet “R10” som är optimerat för ytan och kommer att ersätta det nuvarande "R9" -paketet.
"Vi designade uppdraget från början för att kunna uppgradera programvaran efter behov för olika faser av uppdraget," sade Ben Cichy från NASA: s Jet Propulsion Laboratory i Pasadena, Kalifornien, chef för programvaruingenjör för Mars Science Laboratory. ”Flygsoftwareversionen Curiosity använder för närvarande [R9] var riktigt fokuserad på landning av fordonet. Det innehåller många funktioner som vi bara inte behöver mer. Det ger oss grundläggande funktioner för att använda rover på ytan, men vi har planerat hela tiden att byta efter landning till en version av flygprogramvara som verkligen är optimerad för ytoperationer. ”
Programvara på både primär- och reservdatorer uppgraderas noggrant steg för steg. Han sade att det första steget på tån på fredagen för att testa uppgraderingen var det första steget.
”R10 är optimerad för ytanvändning och har det som vetenskapsteamet vill ha. Det laddas ner under de kommande fyra Sols för att möjliggöra detta fantastiska uppdrag, ”sa Cichy vid en JPL-nyhetsmöte den 10. augusti.
"Just nu har vi förmågan i vår grundläggande ytprogramvara att kontrollera instrumentens hälsa, men vi har egentligen inte möjlighet att gå till fullo utnyttja all denna fantastiska hårdvara som vi skickade till Mars."
”Så R10-programvaran ger oss förmågan att använda robotarmen fullt ut, använda borren, använda dammborttagningsverktyget, använda hela provtagningskedjan och skada proverna och analysera dem, allt detta spännande grepp detta uppdrag kommer att göra ”.
”Nyfikenhet är en Martian mega rover och är född att köra! R10 ger oss möjligheten att köra autonomt och använda bilder för att upptäcka faror och köra säkert. ”
Hittills går uppgraderingen av programvaran som planerat i helgen.
Nyfikenhet gjorde en oöverträffad landning inuti Gale Crater den 5 augusti 6 med användning av raketdrivna "Sky Crane" härkomststeg som sänkte nyfikenheten med kablar på Röda planetens yta exakt som planerat på slättarna vid Mount Sharp bara några miles från basen på det gigantiska berget.
Mount Sharp täcker mycket av det inre av den 96 mil breda (154 km) Gale Crater. Toppen på det 3,4 mil höga skiktade berget är högre än Mount Whitney i Kalifornien.
För jämförelse, se Curiositys första bredare fält efter landning av Mount Sharp i 2 D och 3 D från den lägre upplösningen Hazcam-kameror med fiskar, här
NASAs 1 ton mega rover Curiosity är den största och mest komplexa roboten som någonsin har skickats till ytan på en annan planet, med en nyttolast på 10 modernaste vetenskapliga instrument som väger 15 gånger mer än något tidigare fordrivande fordon. Curiositys mål är att bestämma om Mars någonsin kunde stödja mikrobiellt liv, tidigare eller nuvarande och att söka efter livstecken i form av organiska molekyler.