Följande är ett utdrag från min nya bok, "Otroliga berättelser från rymden: En bakom kulisserna. Titta på uppdragen förändra vår syn på kosmos," som kommer att släppas i morgon, december. Boken är en inre titt på flera aktuella NASA: s robotuppdrag, och detta utdrag är del 1 av 3 som kommer att publiceras här på Space Magazine, i kapitel 2, "Roving Mars with Curiosity." Boken är tillgänglig för beställning på Amazon och Barnes & Noble.
Sju minuters terror
Det tar ungefär sju minuter för ett medelstora rymdfarkoster - som en rover eller en robotlander - att stiga ner genom Mars-atmosfären och nå planetens yta. Under dessa korta minuter måste rymdskeppet bromsa upp från sin brinnande inkommande hastighet på cirka 13 000 km / h (20 km / h) för att röra sig vid bara 3 km / h (3 km / h) eller mindre.
Detta kräver att en Rube Goldberg-liknande serie av händelser äger rum i perfekt sekvens, med exakt koreografi och timing. Och allt behöver ske automatiskt via datorn, utan inmatning från någon på jorden. Det finns inget sätt att leda rymdskeppet på distans från vår planet, ungefär 150 miljoner miles (250 miljoner km) bort. På det avståndet tar radiosignalfördröjningstiden från Jorden till Mars över 13 minuter. Därför, när sju minuters nedstigningen är klar, har alla dessa händelser hänt - eller inte hänt - och ingen på jorden vet vilken. Antingen sitter ditt rymdskepp magnifika på ytan av Mars eller ligger i en kraschad hög.

Det är därför forskare och ingenjörer från uppdragen till Mars kallar det "Seven Minutes of Terror."
Och med Mars Science Laboratory (MSL) -uppdraget, som lanserades från jorden i november 2011, ökade rädslan och skräcken för vad som officiellt kallas 'Entry, Descent and Landing' (EDL) exponentiellt. MSL har en 1 ton (900 kg), 6-hjulig rover med namnet Curiosity, och denna rover skulle använda ett helt nytt, obestämt landningssystem.
Hittills har alla Mars-landare och rovers använt - i ordning - en raketstyrd entré, en värmesköld för att skydda och bromsa fordonet, sedan en fallskärm, följt av thrusterar för att bromsa fordonet ännu mer. Nyfikenhet skulle också använda denna sekvens. En sista, avgörande komponent omfattade emellertid en av de mest komplexa landningsapparater som någonsin har flög.

Döpt "Sky Crane", skulle ett svävande raketappar sänka rovern på 20 m (20 meter) kablar av Vectran rep som en rappande bergsbestigare, med roveren mjuka landning direkt på sina hjul. Allt detta behövde slutföras på några sekunder, och när datorn ombord avkände touchdown skulle pyrotekniken bryta repen och det svävande avstigningssteget zooma bort med full gas för att krascha långt från nyfikenhet.
Efter att komplicera frågorna ännu längre, skulle denna rover försöka den mest exakta landvärlden någonsin och satt ner i en krater bredvid ett berg på Mount Rainiers höjd.
En stor del av osäkerheten var att ingenjörer aldrig kunde testa hela landningssystemet tillsammans, i följd. Och ingenting kunde simulera de brutala atmosfäriska förhållandena och lättare tyngdkraften som finns på Mars förutom att vara på själva Mars. Eftersom den riktiga landningen skulle vara första gången den fullständiga Sky Crane skulle användas, fanns det frågor: Vad händer om kablarna inte separerade? Tänk om nedstigningssteget fortsatte att falla högst upp på rover?
Om Sky Crane inte fungerade, skulle det vara över-spelet för ett uppdrag som redan hade övervunnit så mycket: tekniska problem, förseningar, kostnadsöverskridanden och vrede av kritiker som sa att denna $ 2,5 miljarder Mars-rover blödade pengar från resten av NASA: s planetära utforskningsprogram.

Uppdrag till Mars
Med sin röda glöd på natthimlen har Mars vinkat till himmelskådare i århundraden. Som den närmaste planeten till Jorden som erbjuder någon potential för framtida mänskliga uppdrag eller kolonisering, har den varit av stort intresse för rymdutforskningens ålder. Hittills har över 40 robotuppdrag lanserats till Röda planeten ... eller mer exakt, 40-plus-uppdrag har varit försökte.
Inklusive alla amerikanska, europeiska, sovjetiska / ryska och japanska ansträngningar har mer än hälften av Mars-uppdragen misslyckats, antingen på grund av en lanseringskatastrof, en funktionsfel på väg till Mars, ett bottenförsök att glida in i bana eller en katastrofal landning. Medan de senaste uppdragen har haft större framgång än våra första banbrytande försök att utforska Mars in situ (på plats) rymdforskare och ingenjörer bara delvis tullar när de pratar om saker som en 'Great Galactic Ghoul' eller 'Mars Curse' som krossar uppdrag.

Men det har också varit fantastiska framgångar. Tidiga uppdrag på 1960- och 70-talet, som Mariner orbiters och Viking-landare, visade oss en slående vacker, även om karrig och stenig värld, och därmed krossade alla hopp om "små gröna män" som våra planetgrannar. Men senare uppdrag avslöjade en dikotomi: magnifik öde i kombination med frestande antydningar om tidigare - eller kanske till och med dagens vatten - och global aktivitet.
Idag är Mars yta kallt och torrt, och dess viskstunna atmosfär skyddar inte planeten från bombardering av strålning från solen. Men indikationer är att förhållandena på Mars inte alltid var så här. Synliga från omloppsbana är kanaler och komplicerade dalsystem som verkar ha ristats av strömmande vatten.
I årtionden har planetforskare diskuterat huruvida dessa funktioner bildades under korta, våta perioder orsakade av kataklysmiska händelser som en massiv asteroidstrejk eller plötslig klimatolycka, eller om de bildades under miljoner år när Mars kan ha varit kontinuerligt varm och våt. Mycket av bevisen hittills är tvetydiga; dessa funktioner kunde ha bildats på något sätt. Men för miljarder år sedan, om det fanns floder och hav, precis som på jorden, kan livet ha tagit grepp.

The Rovers
Curiosity rover är den fjärde mobila rymdskepp NASA har skickat till Mars ytan. Den första var en 23-kilos (10,6 kg) rover med namnet Sojourner som landade på en bergtäckt Martian slätt den 4 juli 1997. Omkring storleken på en mikrovågsugn, den 2-fots (65 cm) långa Sojourner korsade aldrig mer än 40 meter från landaren och basstationen. Rover och lander utgjorde tillsammans Pathfinder-uppdraget, som förväntades pågå ungefär en vecka. Istället varade det nästan tre månader och duon returnerade 2,6 gigabit data, snappade mer än 16 500 bilder från landaren och 550 bilder från rover, liksom att göra kemiska mätningar av stenar och mark och studera Mars atmosfär och väder. Den identifierade spår av en varmare, våtare förgångna för Mars.

Uppdraget ägde rum när Internet just blev alltmer populärt, och NASA beslutade att publicera bilder från rover online så snart de strålades till jorden. Detta slutade med att bli en av de största händelserna i det unga Internetets historia, med NASA: s webbplats (och spegelwebbplatser inrättade för den höga efterfrågan) som fick över 430 miljoner träffar under de första 20 dagarna efter landningen.
Pathfinder använde också ett ovanligt landningssystem. Istället för att använda thrusterar för att röra ner på ytan, samlade ingenjörerna ett system med jätte- airbags för att omge och skydda rymdskeppet. Efter att ha använt det konventionella systemet med en raketstyrd inträde, värmesköld, fallskärmar och thrusterar, uppblåst krockkuddarna och den kokade landaren tappades från 30 fot över marken. Pathfinder hoppade flera gånger över Mars ytytider som en jätte strandboll, så småningom stoppade, krockkuddarna tömdes ut och landaren öppnades för att låta rover komma ut.
Även om det kan låta som en galen landningsstrategi, fungerade den så bra att NASA beslutade att använda större versioner av krockkuddarna för nästa rover-uppdrag: två identiska rovers med namnet Spirit och Opportunity. Mars Exploration Rovers (MER) är ungefär storleken på en ridande gräsklippare, 1,6 fot lång (1,6 meter) och väger cirka 185 kg. Spirit landade framgångsrikt nära Mars ekvator den 4 januari 2004 och tre veckor senare studsade möjligheten ner på andra sidan planeten. Målet med MER var att hitta bevis på tidigare vatten på Mars, och båda rovers träffade jackpotten. Bland många fynd hittade Opportunity forntida klippor som bildades i strömmande vatten och Spirit fann ovanliga blomkålformade kiseldioxidarter som forskare fortfarande studerar, men de kan ge ledtrådar till potentiellt forntida marsliv.

Otroligt, vid detta skrivande (2016) fungerar fortfarande Opportunity rover, kör mer än ett maraton (26 miles / 42 km) och det fortsätter att utforska Mars vid en stor krater vid namn Endeavour. Spirit dog dock efter förlorad makt under den kalla Martianvinteren 2010 efter att ha fastnat i en sandtrap. De två roverna överlevde långt sin beräknade livslängd på 90 dagar.
På något sätt utvecklade roverna var och en en "personlighet" - eller kanske ett bättre sätt att uttrycka det är som människor delad personligheter till robotarna. Spirit var ett problembarn och dramadrottning men var tvungen att kämpa för varje upptäckt; Möjligheten, en privilegierad yngre syster och stjärnprestanda, eftersom nya fynd tycktes komma lätt för henne. Spirit and Opportunity var inte utformade för att vara bedårande, men de charmiga roversna fångade både fantasier och barn med rutinerade rymdveteraner. MER-projektledare John Callas kallade en gång tvillingroversna för de sötaste sakerna i solsystemet. När de långlivade, plockiga roversna övervann faror och faror, skickade de vykort från Mars varje dag. Och jordgubbar älskade dem för det.
Nyfikenhet
Även om det länge har funnits på vår utrymme att göra-lista, har vi ännu inte kommit fram till hur vi skickar människor till Mars. Vi behöver större och mer avancerade raketer och rymdfarkoster, bättre teknik för saker som livsstöd och odling av vår egen mat, och vi har verkligen inte förmågan att landa de mycket stora nyttolast som behövs för att skapa en mänsklig bosättning på Mars.
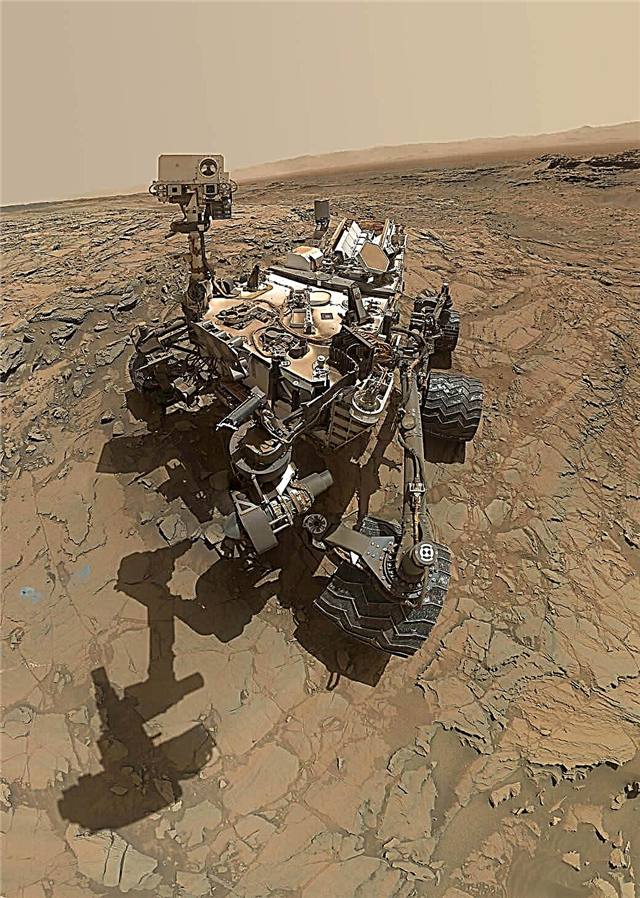
Men under tiden - medan vi försöker ta reda på allt detta - har vi skickat robotekvivalenten av en mänsklig geolog till Röda planeten. Den bilstora Curiosity-roveren är beväpnad med en mängd sjutton kameror, en borr, en scoop, en handlins och till och med en laser. Dessa verktyg liknar utrustning som geologer använder för att studera stenar och mineraler på jorden. Dessutom härmar denna rover mänsklig aktivitet genom bergsklättring, äta (bildligt sett), böja sin (robot) arm och ta selfies.

Denna grymtande robotgeolog är också ett mobilt kemilabb. Totalt tio instrument på rover hjälper till att söka efter organiskt kol som kan indikera det råmaterial som krävs av livet, och "sniffa" den Martiska luften och försöker lukta om gaser som metan - som kan vara ett tecken på liv - finns. Curiositys robotarm bär en schweizisk armékniv av prylar: en förstoringslinsliknande kamera, en spektrometer för att mäta kemiska element, och en borr för att borras inuti stenar och mata prover till laboratorierna med namnet SAM (Sample Analysis at Mars) och) och CheMin (Kemi och Mineralogi). ChemCam-lasern kan förånga berg från upp till 23 fot (7 meter) bort och identifiera mineralerna från spektrumet av ljus som släpps ut från det sprängta berget. En väderstation och strålningsövervakare avrunder enheterna ombord.
Med dessa kameror och instrument blir rover ögonen och händerna för ett internationellt team med cirka 500 jordbundna forskare.
Medan de tidigare Mars-roversna använde soluppsättningar för att samla solljus för kraft, använder Curiosity en RTG som New Horizons. Den elektricitet som produceras från RTG driver upprepade gånger laddningsbara litiumjonbatterier, och RTG: s värme rörs också in i rover-chassit för att hålla den inre elektroniken varm.
Med Curiositys storlek och vikt var det airbag-landningssystemet som använts av de tidigare roversna utan tvekan. Som NASA-ingenjören Rob Manning förklarade: "Du kan inte studsa något så stort." Sky Crane är en fräsch lösning.
Nyfikenhetens uppdrag: ta reda på hur Mars utvecklats under miljarder år och avgör om det en gång var - eller till och med nu - kan stödja mikrobiellt liv.
Nyfikenhetens mål för utforskning: 5,5 km höga bergsforskare från Mars kallar Mt. Skarp (formellt känd som Aeolis Mons) som ligger mitt i Gale Crater, en höjdbassäng på 96 mil (155 km).
Gale valdes från 60 kandidatsajter. Data från kretsande rymdskepp bestämde att berget har dussintals lager av sedimentärt berg, kanske byggt under miljoner år. Dessa lager kunde berätta historien om Mars geologiska och klimathistoria. Dessutom verkar både berget och krateret ha kanaler och andra funktioner som ser ut som om de ristades av strömmande vatten.
Planen: MSL skulle landa i en lägre, plattare del av krateret och försiktigt arbeta sig uppåt mot berget, studera varje lager, i huvudsak genomföra en rundtur i epokarna från Mars 'geologiska historia.
Det svåraste skulle vara att komma dit. Och MSL-teamet hade bara en chans att få det rätt.
Landning Night
Curiositys landning den 5 augusti 2012 var en av de mest förväntade rymdutforskningshändelserna i den senaste historien. Miljontals människor såg händelser som utspelar sig online och på TV, med sociala medieflöden surrande av uppdateringar. NASA TV: s flöde från JPL: s missionskontroll sändes direkt på skärmarna i New Yorks Time Square och på platser världen över som är värd för "landningsfester".
Men handlings episoden var vid JPL, där hundratals ingenjörer, forskare och NASA-tjänstemän samlades på JPL: s rymdflygningsanläggning. EDL-teamet - alla bär matchande ljusblå poloshirts - övervakade datorkonsoler vid uppdragskontroll.
Två medlemmar i teamet stod fram: EDL-teamet ledde Adam Steltzner - som bär sitt hår i en Elvis-liknande pompadour - tempo fram och tillbaka mellan raderna med konsoler. Flygdirektör Bobak Ferdowski sportade och en genomarbetade stjärnor och ränder Mohawk. Naturligtvis har exotiska frisyrer under det tjugoförsta århundradet ersatt 1960-talets svarta glasögon och fickskydd för NASA-ingenjörer.

Vid tidpunkten för landningen var Ashwin Vasavada en av de längst betjänande forskarna i uppdragsteamet och anslöt sig till MSL som vice projektforskare 2004 när rover var under uppbyggnad. Då arbetade en stor del av Vasavadas jobb med instrumentteamen för att slutföra målen för sina instrument och övervaka tekniska team för att hjälpa till att utveckla instrumenten och integrera dem med rover.
Var och en av de tio utvalda instrumenten förde ett team av forskare, så med ingenjörer, extra personal och studenter var det hundratals människor som gjorde roveren redo för lansering. Vasavada hjälpte till att samordna varje beslut och modifiering som kan påverka den eventuella vetenskapen som görs på Mars. Under landningen var han dock bara se på.
”Jag var i rummet bredvid kontrollrummet som visades på TV,” sa Vasavada. "För landningen fanns ingenting jag kunde göra förutom att förstå de senaste åtta åren av mitt liv och hela min framtid reste alla på de sju minuterna av EDL."
Dessutom, det faktum att ingen skulle veta roverens verkliga öde förrän 13 minuter efter faktum på grund av radiofördröjningstiden ledde till en känsla av hjälplöshet för alla på JPL.
"Även om jag satt i en stol", tillade Vasavada, "tror jag att jag var mentalt krullad i fostrets läge."
När Curiosity gick närmare Mars, tre andra veteran rymdfarkoster som redan kretsade runt planeten rörde sig i position för att kunna hålla ett öga på nykomlingen MSL när det överförde information om dess status. Först kommunicerade MSL direkt till Deep Space Network (DSN) -antenner på jorden.
För att göra telemetri från rymdskeppet så strömlinjeformat som möjligt under EDL, sände Curiosity 128 enkla men distinkta toner som indikerade när steg i landningsprocessen aktiverades. Allen Chen, en ingenjör i kontrollrummet meddelade var och en när de kom: ett ljud indikerade att rymdskeppet gick in i Mars 'atmosfär; en annan signalerade att skyven sköt och ledde rymdskeppet mot Gale Crater. Tentativ klapp och leenden kom från teamet på Mission Control i de tidiga tonerna, med känslor som ökade när rymdskeppet rörde sig närmare och närmare ytan.
Halvvägs genom nedstigningen gick MSL under den Martiska horisonten och satte den ur kommunikation med jorden. Men de tre banorna - Mars Odyssey, Mars Reconnaissance Orbiter och Mars Express - var redo att fånga, spela in och vidarebefordra data till DSN.

Sömlöst fortsatte tonerna att komma till jorden när varje steg i landningen fortsatte felfritt. Fallskärmen utplacerade. Värmeskölden tappade bort. En ton signaliserade nedstigningssteget som bär roveren släpps av fallskärmen, en annan indikerade drevet flygning och nedstigning mot ytan. En annan ton innebar att Sky Crane började sänka roveren till ytan.
En ton kom, vilket indikerar att Curiositys hjul rörde ytan, men till och med det betydde inte framgång. Teamet var tvungen att se till att Sky Crane flyvningsmanöver fungerade.
Sedan kom den ton som de väntade på: "Touchdown bekräftade," jublade Chen. "Vi är säkra på Mars!"
Pandemonium och glädje bröt ut i JPL: s uppdragskontroll, på landningsfestplatserna och på sociala medier. Det verkade som om världen firades tillsammans i det ögonblicket. Kostnadsöverskridningar, förseningar, alla negativa saker som någonsin sägs om MSL-uppdraget tycktes försvinna med landningens triumf.
"Välkommen till Mars!" chef för Jet Propulsion Laboratory, Charles Elachi, sade på en presskonferens efter den dramatiska beröringen, ”Ikväll landade vi, i morgon börjar vi utforska Mars. Vår nyfikenhet har inga gränser. ”

"De sju minuterna gick faktiskt riktigt snabbt," sa Vasavada. ”Det var över innan vi visste om det. Då hoppade alla upp och ner, även om de flesta av oss fortfarande bearbetade att det gick så framgångsrikt. ”
Att landningen gick så bra - verkligen perfekt - kan ha chockat en del av teamet på JPL. Medan de hade repeterat Curiositys landning flera gånger, anmärkningsvärt, kunde de aldrig landa fordonet i sina simuleringar.
"Vi försökte öva på det mycket exakt," sa Vasavada, "så att allt var i synk - både telemetri som vi simulerade som skulle komma från rymdskeppet, tillsammans med realtidsanimationer som hade skapats. Det var en ganska komplex sak, men det fungerade faktiskt aldrig. Så den verkliga, faktiska landningen var första gången allt fungerade korrekt. ”
Nyfikenhet programmerades för att omedelbart ta bilder av dess omgivningar. Inom två minuter efter landningen strålades de första bilderna till jorden och dyktes upp på visningsskärmarna på JPL.
"Vi hade tidpunkten för banorna att flyga över under landningen, men visste inte med säkerhet om deras relälänk skulle hålla tillräckligt länge för att få de första bilderna ner," sa Vasavada. ”De första bilderna var ganska råttiga eftersom skyddsskydden fortfarande fanns på kamerorna och thrusterarna hade sparkat upp mycket damm på skydden. Vi kunde inte riktigt se det så bra men vi hoppade ändå upp och ner trots att det här var bilder från Mars. ”
Fantastiskt visade en av de första bilderna exakt vad rover hade skickats för att studera.
”Vi hade landat med kamerorna som i princip vänd direkt mot Mt. Skarp, ”sa Vasavada och skakade på huvudet. ”I HazCam-bilden (farokamera), precis mellan hjulen, hade vi detta underbara skott. Där var berget. Det var som en förhandsgranskning av hela uppdraget, precis framför oss. ”

Imorgon: Del 2 av "Roving Mars With Curiosity", med "Living on Mars Time" och "Discoveries"
"Otroliga berättelser från rymden: en bakom kulisserna titta på uppdragen som ändrar vår syn på kosmos" publiceras av Page Street Publishing, ett dotterbolag till Macmillan.