Följande är det sista utdraget från min nya bok, "Otroliga berättelser från rymden: En bakom kulisserna. Titta på uppdragen som ändrar vår syn på kosmos." Boken är en inre titt på flera aktuella NASA-robotuppdrag, och detta utdrag är del 3 av 3 publicerat här på Space Magazine, i kapitel 2, "Roving Mars with Curiosity." Du kan läsa del 1 här och del 2 här. Boken finns tillgänglig i tryckt eller e-bok (Kindle or Nook) Amazon och Barnes & Noble.
Hur man kör en Mars Rover
Hur vet nyfikenhet var och hur man kör över Mars yta? Du kan tänka dig ingenjörer på JPL med hjälp av joysticks, liknande de som används för leksaker för fjärrkontroll eller videospel. Men till skillnad från RC-körning eller spel, har Mars rover-förarna inte omedelbara visuella ingångar eller en videoskärm för att se vart roverna går. Och precis som vid landningen finns det alltid en tidsfördröjning när ett kommando skickas till rover och när det tas emot på Mars.
"Det kör inte i en interaktiv mening i realtid på grund av tidsfördröjningen," förklarade John Michael Morookian, som leder teamet av roverförare.
Morookians och hans teams verkliga titel är "Rover Planners", som exakt beskriver vad de gör. Istället för att "köra" roverna i sig; de planerar ut rutten i förväg, programmerar specialiserad programvara och laddar upp instruktionerna till Curiosity.
"Vi använder bilder som tagits av rover i dess omgivningar," sade Morookian. ”Vi har en uppsättning stereobilder från fyra svartvita navigeringskameror, tillsammans med bilder från Hazcams (kameror med riskförebyggande), som stöds av högupplösta färgbilder från MastCam som ger oss information om terrängens natur framåt och ledtrådar om typer av stenar och mineraler på platsen. Detta hjälper till att identifiera strukturer som ser intressanta ut för forskarna. ”
Med hjälp av all tillgänglig data kan de skapa en tredimensionell visualisering av terrängen med specialiserad programvara som kallas Rover Sequencing and Visualization Program (RSVP).
"Det här är i grund och botten en Mars-simulator och vi lägger en simulerad nyfikenhet i ett panorama av scenen för att visualisera hur roveren kunde korsa sin väg," förklarade Morookian. ”Vi kan också ta på oss stereoglas som gör att våra ögon kan se scenen i tre dimensioner som om vi var där med rover.
I virtual reality kan roverförarna manipulera scenen och rover för att testa alla möjligheter på vilka rutter som är bäst och vilka områden man ska undvika. Där kan de göra alla misstag (fastna i en sanddyn, vippa roveren, krascha i en stor sten, köra av ett fällning) och perfekta körsekvensen medan den riktiga roveren förblir säker på Mars.
"Forskarna granskar också bilderna för funktioner som är intressanta och rådfråga Rover Planners för att definiera en väg. Sedan komponerar vi de detaljerade kommandona som är nödvändiga för att få nyfikenhet från punkt A till punkt B längs den vägen, ”sa Morookian. "" Vi kan också integrera de kommandon som krävs för att ge rover riktning för att få kontakt med webbplatsen med hjälp av dess robotarm. "

Så rover beordras varje natt att stänga av i åtta timmar för att ladda sina batterier med kärnkraftsgeneratorn. Men först sänder Curiosity data till Jorden, inklusive bilder av terrängen och all vetenskaplig information. På jorden tar Rover Planners dessa data, gör sitt planeringsarbete, slutför programvaran och strålar informationen tillbaka till Mars. Sedan vaknar Curiosity, laddar ner instruktionerna och ställer in för att fungera. Och cykeln upprepas.
Nyfikenhet har också en AutoNav-funktion som gör det möjligt för rover att korsa områden som laget ännu inte har sett på bilder. Så det kan gå över kullen och ner på andra sidan till oavgränsat territorium, där AutoNav känner av potentiella faror.
"Vi använder det inte för ofta eftersom det är beräkningsvärt dyrt, vilket innebär att det tar mycket längre tid för rover att arbeta i det läget," sade Morookian. "Vi tycker ofta att det är en bättre handel att bara komma nästa dag, titta på bilderna och köra så långt vi kan se."

När Morookian visade mig de olika rum som används av roverplaneringsteam på JPL, förklarade han hur de behöver fungera över ett antal olika tidsskalor.
"Vi har inte bara den dagliga ruttplaneringen," sade han, "utan gör också långsiktig strategisk planering med orbitalbilder från HiRISE-kameran på Mars Reconnaissance Orbiter och väljer vägar baserade på funktioner sett från bana. Vårt team arbetar strategiskt och ser många månader ut för att definiera de bästa vägarna. ”
En annan process som heter Supra-Tactical ser ut till nästa vecka. Det handlar om forskningsplanerare som hanterar och förfinar de typer av aktiviteter som rover kommer att göra på kort sikt. Eftersom ingen i laget bor på Mars Time längre, räknar Rover Planners planerna under flera dagar på fredagar.
"Eftersom vi inte arbetar på helgerna, innehåller fredagsplanerna flera sols aktiviteter," sa Morookian. "Två parallella team bestämmer vilka dagar rover ska köra och vilka dagar den kommer att göra andra aktiviteter, till exempel arbete med robotarmen eller andra instrument."
Uppgifterna som kommer ner från rover under helgen övervakas dock, och om det finns ett problem, kallas ett team in för att göra en mer detaljerad utvärdering. Morookian indikerade att de hade varit tvungna att engagera nödhelgsteamet flera gånger, men hittills har det inte varit några allvarliga problem. "Det håller oss dock på tårna," sade han.
Rover har ett antal reaktiva säkerhetskontroller av den totala lutningen på roverdäcket och artikuleringen av hjulets upphängningssystem, så om rover går över ett för stort föremål kommer det automatiskt att stanna.
Nyfikenhet byggdes inte för snabbhet. Den var utformad för att resa upp till 200 meter på en dag, men den går sällan så långt i en sol. I början av 2016 hade roveren kört totalt 12 km över Mars ytan.

Det finns flera sätt att avgöra hur långt nyfikenhet har rest, men den mest exakta mätningen kallas "Visual Odometry." Nyfikenhet har specialiserade hål i sina hjul i form av Morse-kodbokstäver, stavande "JPL" - ett nick till hemmet av roverens forsknings- och tekniklag - över den Martiska jorden.
"Visuell odometri fungerar genom att jämföra det senaste paret stereobilder som samlas ungefär varje meter över enheten", säger Morookian. ”Enskilda funktioner i scenen matchas och spåras för att ge ett mått på hur kameran (och därmed rover) har översatt och roterat i tredimensionellt utrymme mellan de två bilderna och det säger oss i väldigt verklig mening hur långt nyfikenhet har gått ”.
En noggrann inspektion av roverbanorna kan avslöja vilken typ av drag hjulen har och om de har glidit, till exempel på grund av höga sluttningar eller sandmark.
Tyvärr har Curiosity nu nya hål i sina hjul som inte ska vara där.
Rover-problem
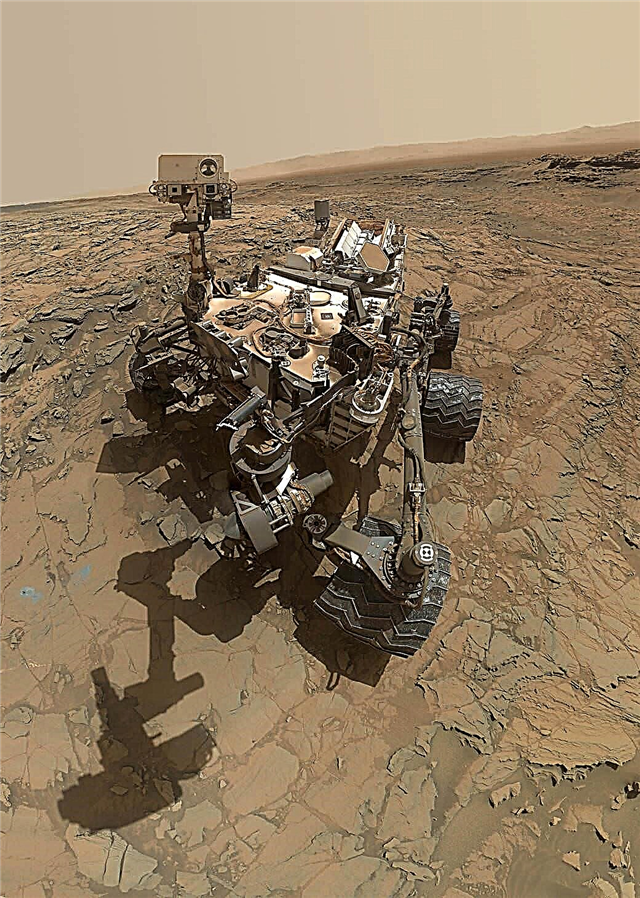
Morookian och projektforskaren Ashwin Vasavada uttryckte båda lättnad och tillfredsställelse att övergripande - så långt in i uppdraget - nyfikenhet är en ganska frisk rover. Hela vetenskapslasten fungerar för närvarande med nästan full kapacitet. Men ingenjörsteamet håller ett öga på några problem.
"Runt sol 400, insåg vi att hjulen bär snabbare än vi förväntat oss," sa Vasavada.

Och slitage bestod inte bara av små hål; teamet började se punkteringar och otäcka tårar. Ingenjörerna insåg att hålen skapades av de hårda, taggade stenarna som roveren körde över under den tiden.
"Vi förväntade oss inte helt den typen av" spetsiga "stenar som skadade," sa Vasavada. ”Vi gjorde också några tester och såg hur ett hjul kunde pressa ett annat hjul in i en sten, vilket gjorde skadan värre. Vi kör nu mer försiktigt och kör inte så länge vi har tidigare. Vi har kunnat jämna ut skadorna till en mer acceptabel takt. "
Tidigt i uppdraget gick Curiositys dator flera gånger i "säkert läge", eftersom Curiositys programvara kände igen ett problem, och svaret var att inte tillåta ytterligare aktivitet och ringa hem.
Specialiserad felskyddsprogramvara körs genom modulerna och instrumenten, och när ett problem uppstår stannar roveren och skickar data som kallas 'händelseposter' till jorden. Posterna innehåller olika brådskategorier, och i början av 2015 skickade rover ett meddelande som i huvudsak sa: "Det här är väldigt, mycket dåligt." Borraren på roverens arm hade upplevt en fluktuation i en elektrisk ström - som en kortslutning.
"Curiositys programvara har förmågan att upptäcka shorts, som den jordfelsbrytare som du har i ditt badrum," förklarade Morookian, "förutom att den här säger" detta är väldigt, väldigt dåligt "istället för att bara ge dig gult ljus."
Eftersom teamet inte kan åka till Mars och reparera ett problem, fixas allt antingen genom att skicka programvaruuppdateringar till rover eller genom att ändra operationella rutiner.

"Vi är bara mer försiktiga nu med hur vi använder borrningen," sade Vasavada, "och borrar inte med full kraft i början, utan sakta uppåt. Det är liksom hur vi kör nu, mer försiktigt, men det blir fortfarande jobbet gjort. Det har ännu inte haft någon stor inverkan. "
En lättare beröring på borrningen var också nödvändig för de mjuka lerstenar och sandstenar som roveren stötte på. Morookian sa att det fanns oro för att de skiktade stenarna kanske inte skulle hålla sig under angreppet av det vanliga borrprotokollet, och så justerade de tekniken för att använda de lägsta "inställningarna" som fortfarande gör det möjligt för borrningen att göra tillräckliga framsteg i berget.
Men möjligheterna att använda borran ökar när nyfikenheten börjar sin korsning uppför berget. Roverna reser genom vad Vasavada kallar ett "rikt rikt, mycket intressant område", eftersom vetenskapsteamet arbetar för att binda samman det geologiska sammanhanget för allt de ser i bilderna.
Hitta balans på Mars
Medan avledningen vid Yellowknife Bay tillät teamet att göra några större upptäckter, kände de press för att komma till Mt. Skarp, så "körde som ett helvete i ett år", sa Vasavada.
Nu på berget finns det fortfarande trycket för att få ut mesta möjliga av uppdraget, med målet att göra det genom minst fyra olika stenenheter - eller lager - på Mt. Skarp. Varje lager kan vara som ett kapitel i Marshistoriens bok.

“Utforska Mt. Sharp är fascinerande, "sade Vasavada," och vi försöker upprätthålla en blandning mellan riktigt bra upptäckter, som - du hatar att säga - saktar ner oss och blir högre på berget. Att titta närmare på en sten framför dig innebär att du aldrig kommer att kunna gå över och titta på den andra intressanta rocken där borta. "
Vasavada och Morookian sa båda att det är en utmaning att bevara den balansen varje dag - att hitta det som kallas "knäet i kurvan" eller "sweet spot" för den perfekta optimeringen mellan körning och stopp för vetenskapen.
Sedan finns balansen mellan att stoppa för att göra en fullständig observation med alla instrument och att göra "flyby science" där mindre intensiva observationer görs.
"Vi tar de observationer vi kan och genererar alla hypoteser vi kan i realtid," sade Vasavada. "Även om vi står kvar med 100 öppna frågor, vet vi att vi kan svara på frågorna senare så länge vi vet att vi har tagit tillräckligt med data."
Nyfikenhetens främsta mål är inte toppmötet, utan istället en region ungefär 1330 fot (400 meter) upp där geologer förväntar sig att hitta gränsen mellan stenar som såg mycket vatten i sin historia, och de som inte gjorde det. Den gränsen kommer att ge insikt i Mars övergång från en våt planet till torr, fylla i ett viktigt gap i förståelsen av planetens historia.

Ingen vet verkligen hur länge nyfikenheten kommer att pågå, eller om den kommer att överraska alla som sina föregångare Spirit and Opportunity. Efter att ha gått förbi ett "primära uppdrag" på ett år på Mars (två jordår), och nu i det utökade uppdraget, är den enda stora variabeln RTG-kraftkällan. Medan den tillgängliga kraften kommer att börja minska stadigt, förväntar sig inte både Vasavada och Morookian att det kommer att vara i en fråga under minst fyra jordår till och med rätt "vårdande" kan makten pågå i ett dussin år eller mer.
Men de vet också att det inte finns något sätt att förutsäga hur lång tid nyfikenheten kommer att gå, eller vilken oväntad händelse som kan avsluta uppdraget.
Djuret
Har nyfikenhet en personlighet som de tidigare Mars-roverna?
"Egentligen nej, vi verkar inte antropomorphize denna rover som folk gjorde med Spirit and Opportunity," sa Vasavada. ”Vi har inte binds känslomässigt med det. Sociologer har faktiskt studerat detta. ” Han skakade på huvudet med ett roligt leende.
Vasavada indikerade att det kan ha något att göra med Curiositys storlek.
”Jag tänker på det som ett jättedjur”, sa han rakt fram. "Men inte på ett vanligt sätt alls."

Vad som har kommit för att karakterisera detta uppdrag, sade Vasavada, är komplexiteten i det, i alla dimensioner: den mänskliga komponenten i att få 500 personer att arbeta och samarbeta samtidigt som vi optimerar allas talanger; hålla roveren säker och frisk; och att hålla tio instrument igång varje dag, som ibland gör helt oberoende vetenskapliga uppgifter.
"Varje dag är vår egen lilla" sju minuters skräck ", där så många saker måste gå rätt varje dag," sa Vasavada. "Det finns en miljon potentiella problem och interaktioner, och du måste ständigt tänka på alla sätt saker kan gå fel på, eftersom det finns en miljon sätt du kan krossa. Det är en komplicerad dans, men lyckligtvis har vi ett bra team. ”
Sedan tilllade han med ett leende, "Det här uppdraget är dock spännande, även om det är ett odjur."
”Otroliga berättelser från rymden: en bakom kulisserna tittar på uppdragen förändrar vår syn på kosmos” publiceras av Page Street Publishing, ett dotterbolag till Macmillan.