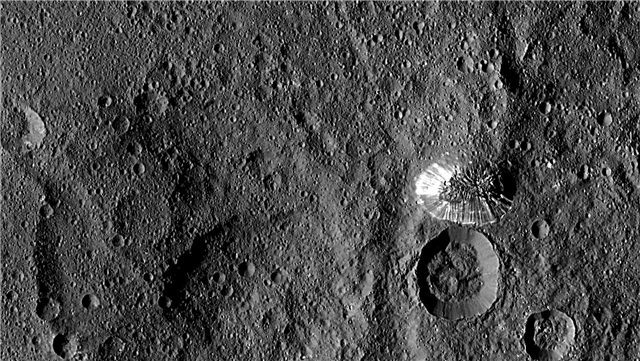
Hayabusa stiger ned på Itokawa innan landning. Bildkredit: JAXA Klicka för förstoring
Hayabusa försökte sin första mjuklandning på Itokawa i syfte att röra ner och samla in prov den 20-21 november 2005. Nedan följer datainformationen med tillhörande förhandsrapport om dess status.
Hayabusa började stiga kl 19:00 den 19 november 2005 (JST) från 1 km i höjd. Vägledningen och navigeringen under processen med tillvägagångssätt kördes normalt och klockan 20.33 den 20 november beordrades den sista inriktningen med vertikal nedstigning från marken, varav mjuklandning framgångsrikt uppnåddes nästan på den utsedda landningsplatsen för yta. Avvikelse från målpunkten undersöks nu men antas inom en marginal på 30 cm.
Hastigheten vid början av nedstigningen var 12 cm / sek. På höjden 54 m vid 05:28 var kommandot trådskärning av målmarkören, varefter rymdskeppet klockan 5:30 på höjden 40m autonomt reducerade sin egen hastighet med 9 cm / sek för att ha väsentligen separerat målmarkören. Det betyder att Hayabusas hastighet blev 3 cm / sek. Separation och fritt fall av markören bekräftades från bilden såväl som från fallande hastighet hos rymdskeppet vid tidpunkten för att minska hastigheten. Markören antas ha landat sydväst om MUSES Sea.
Hayabusa bytte sedan sitt mätområde från Laser Altimeter (LIDAR) till Laser Range Finder (LRF) på 35 m höjd och flyttade till svävande genom att minska fallande hastighet till noll vid 25 m ovanför ytan, nedanför Hayabusa, vid 05:40 på höjden 17m , låt sig fritt falla och fungerar till attitydskontrollläget justerbart efter asteroidytans former. Vid denna tidpunkt stoppade rymdskeppet autonom överföring av telemetriöverföring till jorden (som schemalagd) för att ha ändrats till överföring med fyrläge mer effektivt för Doppler-mätning genom att byta till en låg förstärkningsantenn (LGA) täckbar större yta.
Sedan dess var det inte möjligt att kontrollera ombordinstrumenten i realtid (som schemalagd), men som ett resultat av analysen av de uppgifter som registrerats ombord och skickats tillbaka till jorden under de senaste två dagarna tycktes Hayabusa ha autonomt bedömt att avbryter fallande och försökte nödstigning eftersom dess Fan Beam-sensorer för hinderkontroll upptäckte någon form av fångsljus. Tillåtna marginaler ställs in för Hayabusa för sin inställningskontroll, i det fall rymdskeppet tar upp marken genom att påskynda hastigheten på egen hand. Under sådana omständigheter var det dåliga rymdfarkostens inställning utanför marginalen, varför man därför fortsatte med säker härkomst. Som ett resultat aktiverade Hayabusa inte sin Touch Down Sensor-funktion.
Vid tidpunkten för 21 november bedömdes Hayabusa inte ha landat på ytan. Enligt de återuppspelade uppgifterna bekräftades det dock att Hayabusa stannade kvar på Itokawa genom att hålla kontakten med ytan i cirka 30 minuter efter att ha mjukt hoppat två gånger innan han satt sig. Detta kan verifieras genom LRFs datahistorik och även genom attitydkontrollpost.
Detta fenomen ägde rum under omkopplingsintervallet från Deep Space Network (DSN) från NASA till Usuda Deep Space Center, varför händelsen inte upptäcktes genom Doppler-mätning på marken. Fallande hastighet vid tidpunkten för studsning två gånger var 10 cm / sek. respektive. Allvarlig skada på rymdskeppet har ännu inte hittats utom värmesensor som kan behöva kontrollera någon del av instrumentet.
Hayabusa höll ständig kontakt med ytan tills den signalerades från marken för att ta nödstart vid 06:58 (JST). Touch Down-sensorn som skulle fungera för sampling fungerade inte på grund av ovan angivna orsaker, varför avfyra av projektorn inte implementerades trots att rymdskeppet faktiskt gjorde landning. Attityden vid landningen antas så att de båda nedre ändarna av + X-axeln på samplarhornet och antingen rymdfarkosten eller spetsänden av solpanelerna var i kontakt med ytan. Hayabusa blev världens första rymdskepp som tog fart från asteroiden. Det är verkligen den första världen som avgår från en himmelkropp utom månen.
Efter avgång från asteroiden med markkommando, flyttade Hayabusa till säkert läge på grund av den ostadiga kommunikationslinjen och konflikten med ombord kontroll och datorprioritet. Comebacket från säkerhetsläget till det normala 3-axliga kontrollläget behövde hela två dagar av 21 och 22 november. På grund av detta skäl är återuppspelning av data som registrerats den 20: e fortfarande halvvägs, vilket innebär möjligheten att avslöja mycket mer ny information genom ytterligare analys av uppgifterna. Från och med nu har den detaljerade bilden av landningsplatsen för att veta dess exakta plats ännu inte behandlats. Hayabusa är nu på väg att flyga över till positionen för att möjliggöra landning och provtagningssekvens igen. Det är inte säkert ännu om nedstigningsoperationer kommer att kunna utföras från natten den 25 november (JST). Vi kommer att meddela vårt schema på kvällen den 24 november.
Fallande och landningsoperation beror alla på tillgången till DSN från NASA. Vi vill uttrycka vår uppriktiga tacksamhet för NASA: s samarbete för att spåra nätverk inklusive reservstationer.
Originalkälla: JAXA News Release