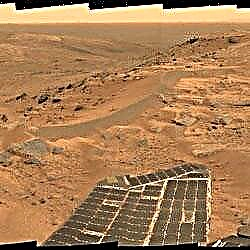
Andens syn på Mars. Bildkredit: NASA / JPL. Klicka för att förstora.
Fjärrkännande banor, sonder, landare och rovers återvänder häpnadsväckande upptäckter om vårt solsystem. Men några av de mest spännande geologiska och potentiellt astrobiologiska platserna i vår familj av planeter och månar är farliga och svåra att utforska.
University of Arizona, California Institute of Technology och U.S. Geological Survey Flagstaff-forskare föreslår ett nytt rymduppdragskoncept för att hitta och utforska de mest vetenskapligt viktiga ytorna och underytorna i hela solsystemet.
Dessa nästa generations robotuppdrag kommer samtidigt att utforska avlägsna platser på flera nivåer - från omloppsbana, från luften och på marken - till hemma i viktiga geologi, hydrologi, klimat och eventuellt astrobiologi i avlägsna världar, säger James M. Dohm från The University of Arizona. Dohm, en planetgeolog i UA: s avdelning för hydrologi och vattenresurser, har kartlagt Mars på lokal till global skala. Han är engagerad i autonoma långsiktiga roving, sensorbana och kretsande rymdskeppsexperiment.
Wolfgang Fink, en besökande medarbetare på Caltech, Dohm och andra diskuterar det nya uppdragskonceptet i en artikel, ”Nästa generation av robotplanetersökningsuppdrag: Ett paradigmskifte”, som kommer att publiceras i Elseviers tidskrift om Planetariska och rymdvetenskap (http : //www.elsevier.com/, gå till artikel i presslänk). De ledde en teaminsats som inkluderar Mark Tarbell, som är Finks associerad i Caltechs Visual and Autonomous Exploration Systems Research Lab; Trent Hare från U.S. Geological Survey-kontoret i Flagstaff; och Victor Baker, Regents 'professor vid UA-avdelningarna för hydrologi och vattenresurser, planetvetenskap och geovetenskap.
Det nya uppdragskonceptet skulle innehålla kretsande rymdskepp, blimpor och ballonger vid planeter eller månar med tillräckliga atmosfärer, såsom Titan, och många enkla, utplacerbara mobila och orörliga marksensorer. Dessa rymdburna, luftburna och markagenter skulle programmeras för att titta smart på miljön och interagera med varandra och erbjuda ett verkligt ”nivåskalbart” perspektiv som behövs för ett vetenskapligt drivet uppdrag, sade Dohm.
"Vi befinner oss nu i ett optimalt fönster när rymdfarkoster och luftburna enheter kan samordna med markbaserade sensorer, särskilt eftersom mycket av tekniken redan finns," säger Fink, en fysiker och en expert på bildsystem, autonom kontroll och rymd mission science analyssystem. "Även teknik som för närvarande inte finns tillgänglig - främst programvara - är mycket uppnåelig."
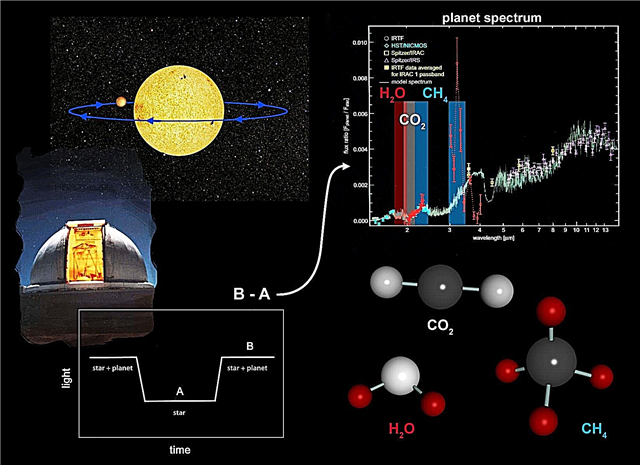
? Det är viktigt att titta på lager och bevislager, inte bara en typ, ”sade Dohm.
Till exempel, sade Fink, kan en rover med funktionsigenkänningsprogramvara leta efter en unik sten som kan innehålla en kritisk del av Mars historia. "Om du lägger till ett luftburen perspektiv ser du också vad som finns på andra sidan kullen samtidigt, och du känner också till roverens exakta fältplats," sade han. Orbiter har den globala bilden av vad som händer och beordrar de luftburen och marknivåerna under den.
Omkringaren i ett nivåskalbart uppdrag är utrustad med aktuell information om ytans, atmosfären och andra funktioner i dess destination. Sin sensorsvit kan innehålla optiska och termiska kameror, spektrometrar och markinträngande radar. Dessa instrument skulle samla information om områden som omloppsmjukvaran känner igen som möjliga intressanta mål med tanke på de övergripande uppdragsvetenskapliga målen.
"Orbiter kan distribuera de luftburna agenterna för en närmare titt," sade Fink. ”Orbiterna kan också beordra de luftburna agenterna att säkert sätta ut markagenter till de främsta målen. De luftburna agenterna hjälper till att upptäcka och bekräfta främsta mål. ”
"Markmedlen kan mäta information som värme eller fukt," sade Dohm. ”Eller så kan de prova eller samla olika stenar och, i fallet med Mars, möjligt ytvatten nära. Det kan finnas många lätta, förbrukningsbara sensorer, så att även om du tappade några få, skulle du fortfarande ha uppdrag. "
Sensorerna skickar information tillbaka till sina respektive luftburna sönder och slutligen till det kretsande rymdskeppet. Baserat på denna nya information skickar orbiten nya kommandon som driver uppdraget.
”De rymdburna, luftburna och markagenterna arbetar alla som fältgeolog,” sade Dohm. "De analyserar information för att skapa en arbetshypotes." De skulle vara idealiska för att utforska Valles Marineris, det expansiva canyonsystemet på Mars eller Europas förmodade istäckta hav, tillade han.
I fallet Valles Marineris, till exempel, sade Dohm, skulle det kretsande rymdskeppet distribuera sensorer som skulle överföra väderförhållandena tillbaka till rymdskeppet. Om sensorerna ger rymdskeppet en bra väderrapport - till exempel inga höga vindar - skulle rymdskeppet sedan släppa ballongerna eller reflexerna. Dessa luftburna agenter skulle starta sina sökningar efter mål viktiga för uppdragsmål, samla in och lägga till ny information när de går och distribuera markagenter på lovande kandidatplatser. Markagenterna skulle samla in och returnera data till de högre nivån luftburna sönder, orbiter, eller båda. "Om målet på Valles Marineris var att hitta möjliga vattensprång eller nära ytvatten, kan en borr rigg till och med användas på den mest lovande platsen," sade Dohm.
Fink och Dohm säger att det nya konceptet behöver ytterligare design, testning och markutrustning i olika jordmiljöer. De föreställer sig fältläger för internationella forskare för att utforma och testa möjliga nivåskalbara rekognoseringssystem.
Intelligenta, vetenskapligt drivna robotutrymmen är ett decennium eller två i framtiden, de kommer att vara internationella och de kommer att ha betydande företags- och privat sponsring, förutspår Dohm och Fink.
Originalkälla: University of Arizona News Release