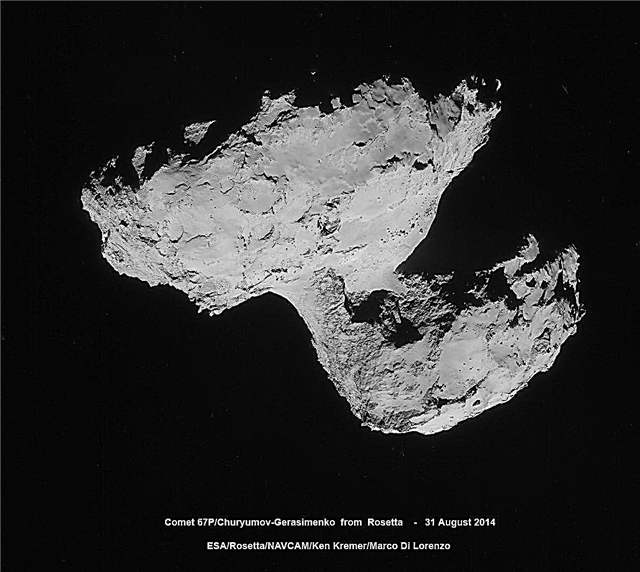
Fotomosaik med fyra bilder som innehåller bilder tagna av Rosettas navigeringskamera den 31 augusti 2014 från 61 km från kometen 67P / Churyumov-Gerasimenko. Kometkärnan är cirka 4 km över.
Krediter: ESA / Rosetta / NAVCAM / Ken Kremer - kenkremer.com/Marco Di Lorenzo
Se roterad version och fyra enskilda bilder nedan [/ bildtext]
ESA: s Rosetta-omloppsbana har nu flyttat sig så nära sitt kometbrott att den ursprungliga kroppen överväldrar skärmen och därmed dess knäppande kartläggande mosaiker för att fånga hela scenen i den bisarra världen så att den kan hitta den lämpligaste platsen för den betydelsefulla Philae-landningen - kommande i mitten av november.
I själva verket har Rosetta 'ritat och fjärdedelat' kometen för att samla in högupplösta vyer av Kometen 67P / Churyumov-Gerasimenko med navcam-kameran på söndagen den 31 augusti.
Navcamkvartetten har precis publicerats på Rosetta-portalen idag, måndag 1 september 2014. ESA bjöd in läsarna att skapa globala fotomosaik.
Se ovanför vår fyra ramfotomosaik av navcam-bilder som Rosetta tog 31 augusti.
Syftet med att ta bilder såväl som spektra och fysiska mätningar på nära håll är att hitta en "tekniskt genomförbar" Philae touchdown-webbplats som är både säker och vetenskapligt intressant.
Nedan är Rosetta-teamets fyra bildnavam-montage, arrangerade individuellt i en 2 x 2 raster.

Rasterföljden för navcam-bilden togs från ett avstånd av 61 km från kometen 67P.
”Cirka en fjärdedel av kometen ses i hörnet på var och en av de fyra bilderna. De fyra bilderna är tagna under ungefär 20 minuter, vilket betyder att det finns en viss rörelse i rymdskeppet och rotationen av kometen mellan bilderna. Som ett resultat är det inte enkelt att göra en ren mosaik av de fyra bilderna, ”enligt ESAs Rosetta-blogg.
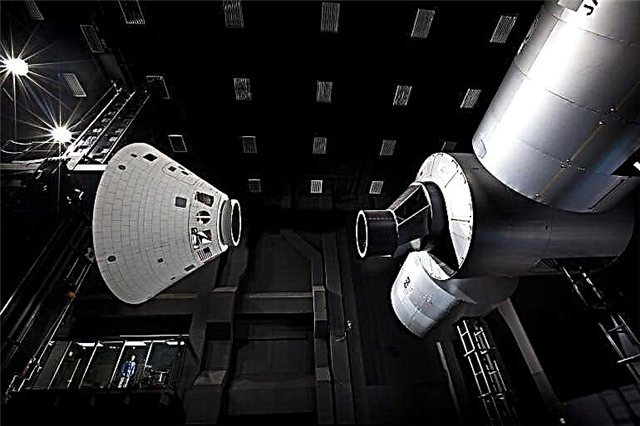
Som jag rapporterade här förra veckan har de "topp 5" -kandidaterna som valts på landningsplatsen valts ut för Rosetta-orbitrarna med piggybacked Philae-landaren för mänsklighetens första försök att landa på en komet.
De potentiella touchdown-platserna tillkännagavs den 25 augusti, baserat på en grundlig analys av högupplösta mätningar som samlats in av ESA: s Rosetta-rymdskepp under de föregående veckorna sedan det anlände till den pockmarkerade Comet 67P / Churyumov-Gerasimenko den 6 augusti 2014.
Se vår montering av landningssidorna "Topp 5" nedan.

Rosetta är ett uppdrag för många första, inklusive historiens första försök någonsin att kretsa en komet för långvarig studie.
Philaes historia som landar på kometen 67P är för närvarande planerad till cirka 11 november 2014 och kommer att vara helt automatisk. Landaren på 100 kg är utrustad med 10 vetenskapliga instrument.
De nya bilderna som släppts idag är de bäst tagna hittills av Navcam-kameran. Proberna OSIRIS vetenskapskamera är ännu mer detaljerade och kommer förhoppningsvis att släppas av ESA snart!
"Detta är första gången landningsplatser på en komet har beaktats," sade Stephan Ulamec, Lander Manager på DLR (German Aerospace Center), i ett uttalande från ESA.
Sedan han kom med kometen efter ett decennium lång jakt på över 6,4 miljarder kilometer (4 miljarder mil) har en prioriterad uppgift för vetenskaps- och ingenjörsteamet som leder Rosetta varit "Hitta en landningsremsa" för Philae-kometlandaren.
"Klockan tickar" för att välja en lämplig landningszon snart eftersom kometen värms upp och ytan blir allt mer aktiv när den svänger närmare solen och gör landningen allt farligare.

Den trebenade landaren kommer att avfyra två harpuner och använda isskruvar för att förankra sig på den 4 kilometer breda kometens yta. Philae samlar stereo- och panoramabilder och borrar också 23 centimeter in och provar dess otroligt varierande yta.
Håll ögonen öppna här för Kens fortsatta Rosetta, Earth and Planetetary science och mänskliga rymdflödesnyheter.


Läs min Rosetta-serie här: